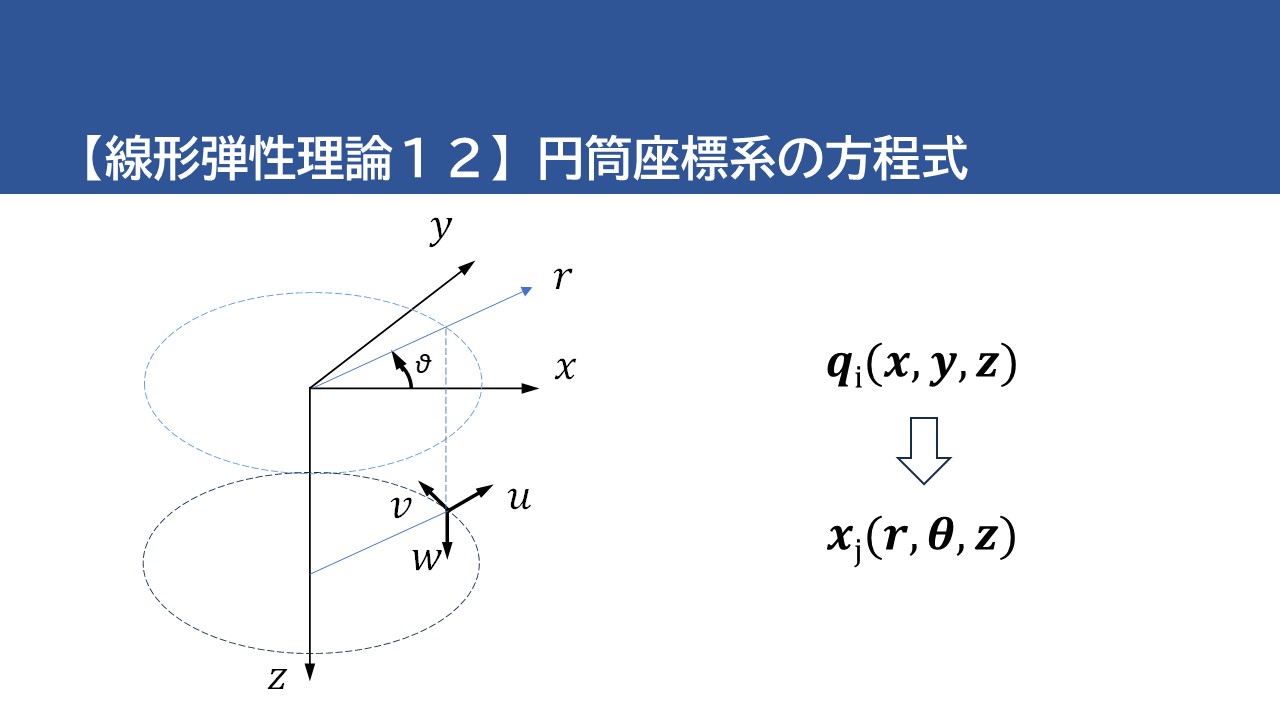
円筒座標を次のように設定します。
$$q_1=r , q_2=θ , q_3=z$$
対応するスケール係数と単位基底ベクトルは次のとおりです。
$$h_1=1 , h_2=r , h_3=1$$
$$e_1=e_r , e_2=e_θ , e_3=k$$
式(123)と式(124)に従って、単位ベクトルの偏微分は、
$$\frac{\partial e_1}{\partial q_1}=0 , \frac{\partial e_1}{\partial q_2}=e_θ , \frac{\partial e_1}{\partial q_3}=0$$
$$\frac{\partial e_2}{\partial q_1}=0 , \frac{\partial e_2}{\partial q_2}=-e_r , \frac{\partial e_2}{\partial q_3}=0$$
$$\frac{\partial e_3}{\partial q_1}=0 , \frac{\partial e_3}{\partial q_2}=0 , \frac{\partial e_3}{\partial q_3}=0$$
これらの関係を使用して、式(125)~式(131) で与えられる微分演算子の式を作成できます。
\(r\) 、\(θ\) 、\(z\) 方向の変位成分をそれぞれ \(u\)、\(v\)、\(w\) で表すと、変位成分とポテンシャルの関係は式(87) (変位ポテンシャルを参照)から次のようになります。
$$u=\frac{\partial φ}{\partial r}+\frac{1}{r}\frac{\partial ψ_z}{\partial θ}-\frac{\partial ψ_θ}{\partial z}=0\tag{132}$$
$$v=\frac{1}{r}\frac{\partial φ}{\partial θ}+\frac{\partial ψ_r}{\partial z}-\frac{\partial ψ_z}{\partial r}=0\tag{133}$$
$$w=\frac{\partial φ}{\partial z}+\frac{1}{r}\frac{\partial ψ_θ}{\partial r}-\frac{1}{r}\frac{\partial ψ_r}{\partial θ}=0\tag{134}$$
ここで、
$$\mathbf{∇}^2=\frac{1}{c_L^2}\frac{\partial ^2φ}{\partial t^2}\tag{135}$$
またラプラシアンは次のように定義されます。
$$\mathbf{∇}^2=\frac{\partial^2}{\partial r^2}+\frac{1}{r}\frac{\partial}{\partial r}+\frac{1}{r^2}\frac{\partial^2}{\partial θ^2}+\frac{\partial^2}{\partial z^2}\tag{136}$$
ベクトルポテンシャルの成分は次の方程式を満足します。
$$\mathbf{∇}^2ψ_r-\frac{ψ_r}{r^2}-\frac{2}{r^2}\frac{\partial ψ_θ}{\partial θ}=\frac{1}{c_T^2}\frac{\partial ^2ψ_r}{\partial t^2}\tag{137}$$
$$\mathbf{∇}^2ψ_θ-\frac{ψ_θ}{r^2}+\frac{2}{r^2}\frac{\partial ψ_r}{\partial θ}=\frac{1}{c_T^2}\frac{\partial ^2ψ_θ}{\partial t^2}\tag{138}$$
$$\mathbf{∇}^2ψ_z=\frac{1}{c_T^2}\frac{\partial ^2ψ_z}{\partial t^2}\tag{139}$$
円筒座標系におけるひずみ-変位関係は、直交座標系の変位 {\(u_x\) , \(u_y\) , \(u_z\)} と円筒座標系の変位 {\(u\) , \(v\) , \(w\)} との関係式
$$u_x=u・cosθ-v・sinθ , u_y=u・sinθ+v・cosθ , u_z=w$$
を直交座標系のひずみ式(92)~式(95)(ひずみ式を参照)に代入し、偏微分演算子の変換式
$$\frac{\partial}{\partial x}=\frac{\partial r}{\partial x}\frac{\partial}{\partial r}+\frac{\partial θ}{\partial x}\frac{\partial}{\partial θ}+\frac{\partial z}{\partial x}\frac{\partial}{\partial z}=cosθ\frac{\partial}{\partial r}-\frac{sinθ}{r}\frac{\partial}{\partial θ}$$
$$\frac{\partial}{\partial y}=\frac{\partial r}{\partial y}\frac{\partial}{\partial r}+\frac{\partial θ}{\partial y}\frac{\partial}{\partial θ}+\frac{\partial z}{\partial y}\frac{\partial}{\partial z}=sinθ\frac{\partial}{\partial r}+\frac{cosθ}{r}\frac{\partial}{\partial θ}$$
$$\frac{\partial}{\partial z}=\frac{\partial r}{\partial z}\frac{\partial}{\partial r}+\frac{\partial θ}{\partial z}\frac{\partial}{\partial θ}+\frac{\partial z}{\partial z}\frac{\partial}{\partial z}=\frac{\partial}{\partial z}$$
を用いて整理すると、
$$ε_r=\frac{\partial u}{\partial r} , ε_θ=\frac{u}{r}+\frac{1}{r}\frac{\partial v}{\partial θ} , ε_z=\frac{\partial w}{\partial z}\tag{140}$$
$$2ε_{rθ}=2ε_{θr}=\frac{\partial u}{\partial r}-\frac{u}{r}+\frac{1}{r}\frac{\partial u}{\partial θ}\tag{141}$$
$$2ε_{θz}=2ε_{zθ}=\frac{1}{r}\frac{\partial w}{\partial θ}+\frac{\partial v}{\partial z}\tag{142}$$
$$2ε_{zr}=2ε_{rz}=\frac{\partial u}{\partial z}+\frac{\partial w}{\partial r}\tag{143}$$
応力-ひずみ関係は、フックの法則式(40)に代入すると、
$$τ_r=λ\Bigl(\frac{\partial u}{\partial r}+\frac{u}{r}+\frac{1}{r}\frac{\partial v}{\partial θ}+\frac{\partial w}{\partial z}\Bigr)+2μ\frac{\partial u}{\partial r}\tag{144}$$
$$τ_θ=λ\Bigl(\frac{\partial u}{\partial r}+\frac{u}{r}+\frac{1}{r}\frac{\partial v}{\partial θ}+\frac{\partial w}{\partial z}\Bigr)+2μ\Bigl(\frac{u}{r}+\frac{1}{r}\frac{\partial v}{\partial θ}\Bigr)\tag{145}$$
$$τ_z=λ\Bigl(\frac{\partial u}{\partial r}+\frac{u}{r}+\frac{1}{r}\frac{\partial v}{\partial θ}+\frac{\partial w}{\partial z}\Bigr)+2μ\frac{\partial w}{\partial z}\tag{146}$$
$$τ_{rθ}=μ\Bigl(\frac{\partial v}{\partial r}-\frac{v}{r}+\frac{1}{r}\frac{\partial u}{\partial θ}\Bigr)\tag{147}$$
$$τ_{θz}=μ\Bigl(\frac{1}{r}\frac{\partial w}{\partial θ}+\frac{\partial v}{\partial z}\Bigr)\tag{148}$$
$$τ_{zr}=μ\Bigl(\frac{\partial u}{\partial z}+\frac{\partial w}{\partial r}\Bigr)\tag{149}$$
式(144)~式(149)に式(132)~式(134)に代入することで、応力を変位ポテンシャルで表わすことが出来ます。
次回は円筒座標系のNavier式を導いてみます。


コメント